15 雅特力AT32A403开发板评测 15 RTOS移植-RT-Thread 线程管理测试
15 雅特力AT32A403开发板评测 RTOS移植-RT-Thread 线程管理测试
1. 软硬件平台
AT32A403A Board开发板
MDK-ARM Keil
RT-Thread V4.1版本源码
发行版下载地址 https://gitee.com/rtthread/rt-thread/releases/tag/v4.1.0
2. RT-Thread
RT-Thread是一个集实时操作系统(RTOS)内核、中间件组件的物联网操作系统,架构如下:
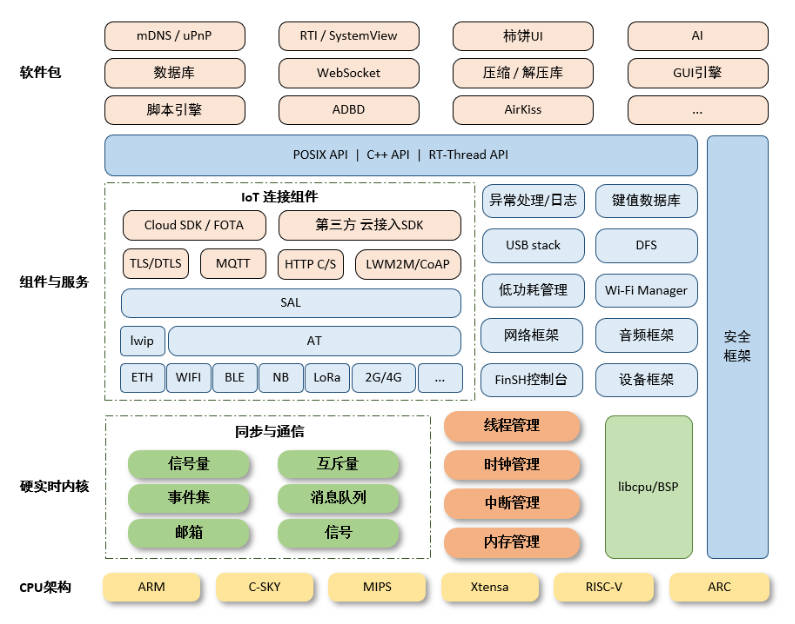
- 内核层:RT-Thread内核,是 RT-Thread的核心部分,包括了内核系统中对象的实现,例如多线程及其调度、信号量、邮箱、消息队列、内存管理、定时器等;libcpu/BSP(芯片移植相关文件 / 板级支持包)与硬件密切相关,由外设驱动和 CPU 移植构成。
- 组件与服务层:组件是基于 RT-Thread内核之上的上层软件,例如虚拟文件系统、FinSH命令行界面、网络框架、设备框架等。采用模块化设计,做到组件内部高内聚,组件之间低耦合。
3. AT32A403A-Board开发板移植
下载RT-Thread V4.1版本源码,寻找at32相关bsp驱动包
复制at32f403a-start,并重新命名为at32a403a-start-board
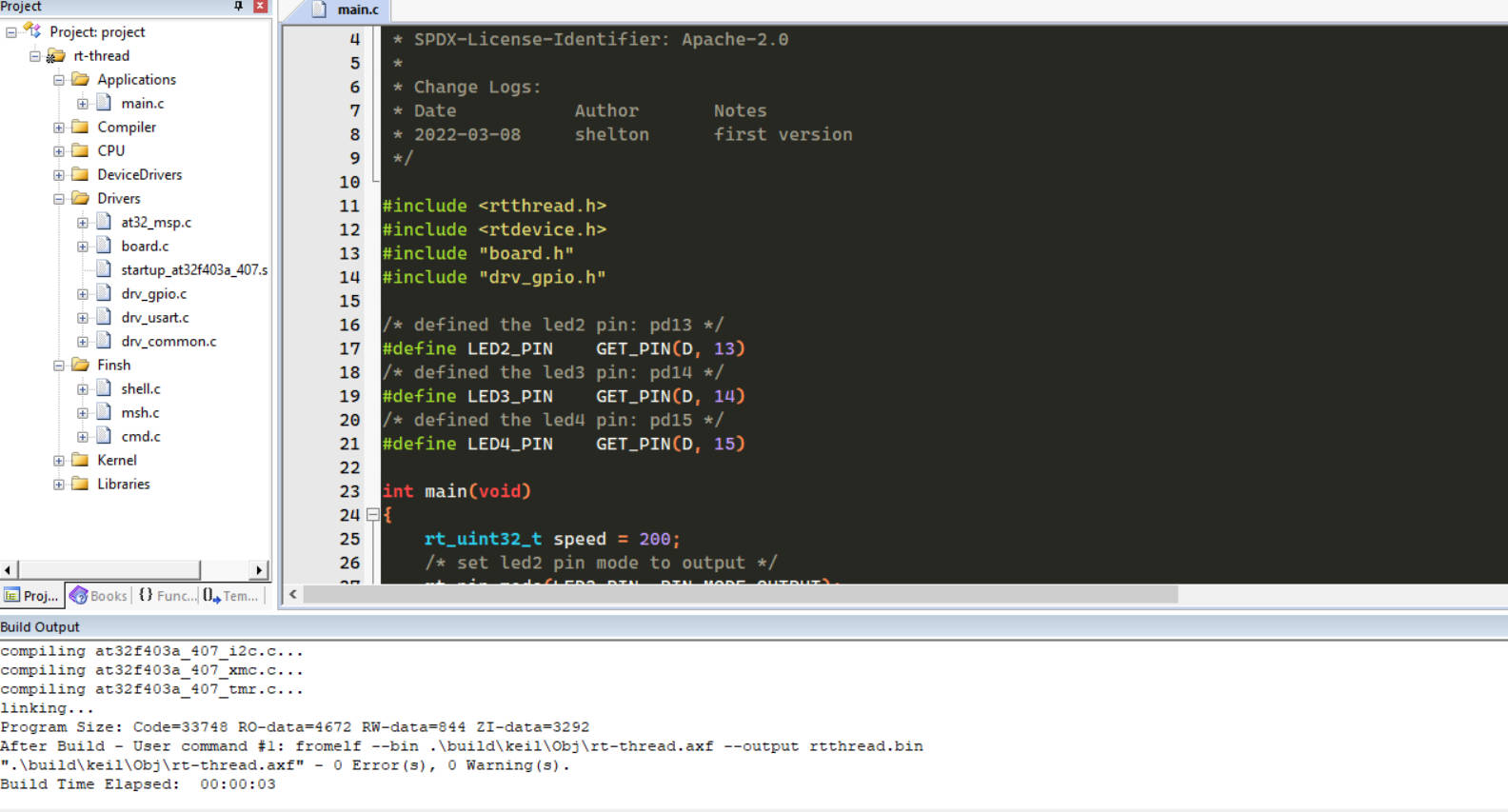
打开对应的工程project,编译下载程序,发现竟然可以直接使用。
我一直比较好奇at32f403a与at32a403a的区别是啥子,我查看一些文档,里面是芯片外设什么的都是差不多的,甚至我感觉都是一样的,但是我没有证据,但是这一次下载代码之后,发现直接通用,感觉可能是同一个芯片,应该经过了比较严格的认证。
虽然上面的at32f403a-start的工程可以直接使用,但是还是建立一下at32a403a的rt-thread工程吧。(主要是用at32a403a的sdk文件替代at32f403a的文件)
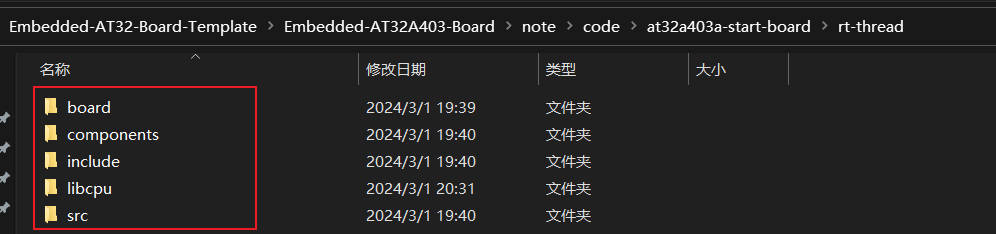
重新建立工程模板,文件架构如下:
名称 描述 applications 应用开发程序 build 编译环节生成中间文件 libraries cmsis,drivers,rt_drivers驱动库文件 rt_examples 相关示例代码 rt-thread rt-thread源码文件夹 components RT-Thread 的各个组件代码,例如 finsh,gui 等。 include RT-Thread 内核的头文件。 libcpu 各类芯片的移植代码。 src RT-Thread 内核的源文件。 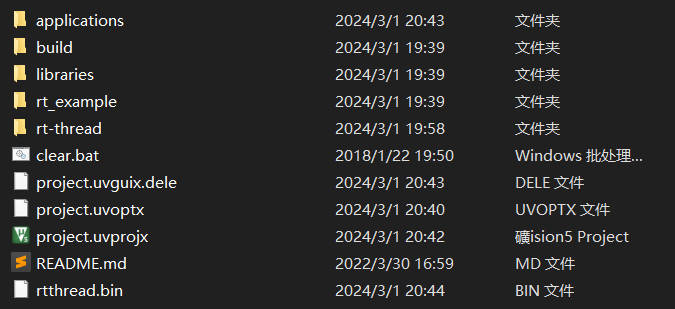

打开工程,添加rt-thread源码文件,东西比较多


添加库文件路径,这个添加也比较麻烦

添加board.c rtconfig.h文件,这两个文件非常重要。重点需要修改这两个文件。(由于直接使用at32f403a的工程,则不需要修改)
注释中断文件中的HardFault_Handler、PendSV_Handler、SysTick_Handler函数
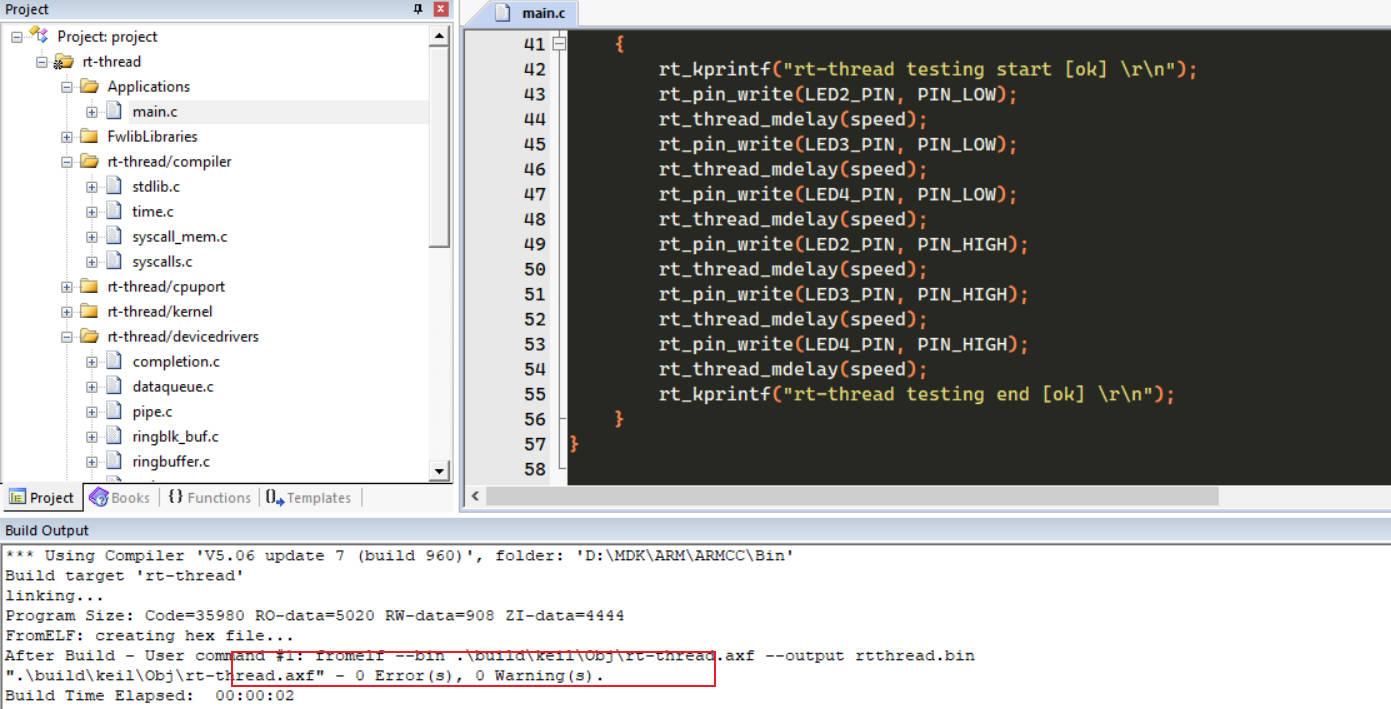
编译代码(文件添加可参考工程设置,上面可能写的不清楚,因为小东西太多了)
4. 编写程序,线程管理测试验证
线程测试函数
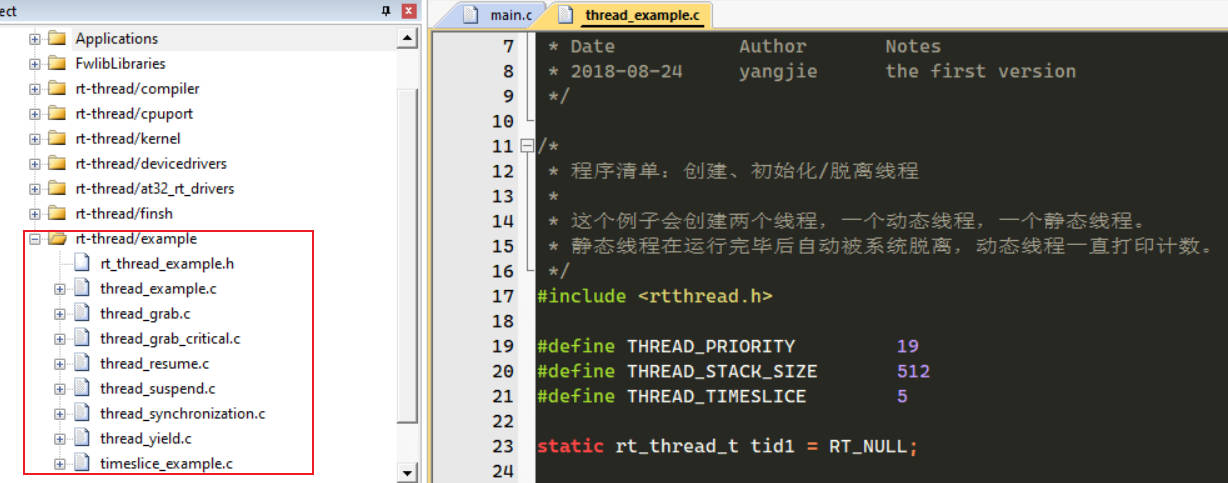
/* * 程序清单:创建、初始化/脱离线程
*
* 这个例子会创建两个线程,一个动态线程,一个静态线程。
* 静态线程在运行完毕后自动被系统脱离,动态线程一直打印计数。
*/
#include <rtthread.h>
#define THREAD_PRIORITY 19
#define THREAD_STACK_SIZE 512
#define THREAD_TIMESLICE 5
static rt_thread_t tid1 = RT_NULL;
/* 线程1的入口函数 */
static void thread1_entry(void *parameter)
{
rt_uint32_t count = 0;
for (count =0 ;count< 20;count++)
{
/* 线程1采用低优先级运行,打印计数值20 */
rt_kprintf("thread1 count: %d\n", count ++);
}
rt_kprintf("thread1 exit\n");
}
ALIGN(RT_ALIGN_SIZE)
static char thread2_stack[1024];
static struct rt_thread thread2;
/* 线程2入口 */
static void thread2_entry(void *param)
{
rt_uint32_t count = 0;
/* 线程2拥有较高的优先级,以抢占线程1而获得执行 */
for (count = 0; count < 10 ; count++)
{
/* 线程2打印计数值 */
rt_kprintf("thread2 count: %d\n", count);
}
rt_kprintf("thread2 exit\n");
/* 线程2运行结束后也将自动被系统脱离 */
}
/* 线程示例 */
int thread_sample(void)
{
/* 创建线程1,名称是thread1,入口是thread1_entry*/
tid1 = rt_thread_create("create_hread1",
thread1_entry, RT_NULL,
THREAD_STACK_SIZE,
THREAD_PRIORITY, THREAD_TIMESLICE);
/* 如果获得线程控制块,启动这个线程 */
if (tid1 != RT_NULL)
rt_thread_startup(tid1);
/* 初始化线程2,名称是thread2,入口是thread2_entry */
rt_thread_init(&thread2,
"init_thread2",
thread2_entry,
RT_NULL,
&thread2_stack[0],
sizeof(thread2_stack),
THREAD_PRIORITY - 1, THREAD_TIMESLICE);
rt_thread_startup(&thread2);
return 0;
}
/* 导出到 msh 命令列表中 */
MSH_CMD_EXPORT(thread_sample, thread sample);主函数
/*
* Copyright (c) 2006-2021, RT-Thread Development Team
*
* SPDX-License-Identifier: Apache-2.0
*
* Change Logs:
* Date Author Notes
* 2022-03-08 shelton first version
*/
#include <rtthread.h>
#include <rtdevice.h>
#include "board.h"
#include "drv_gpio.h"
#include "rt_thread_example.h"
/* defined the led2 pin: pd13 */
#define LED2_PIN GET_PIN(D, 13)
/* defined the led3 pin: pd14 */
#define LED3_PIN GET_PIN(D, 14)
/* defined the led4 pin: pd15 */
#define LED4_PIN GET_PIN(D, 15)
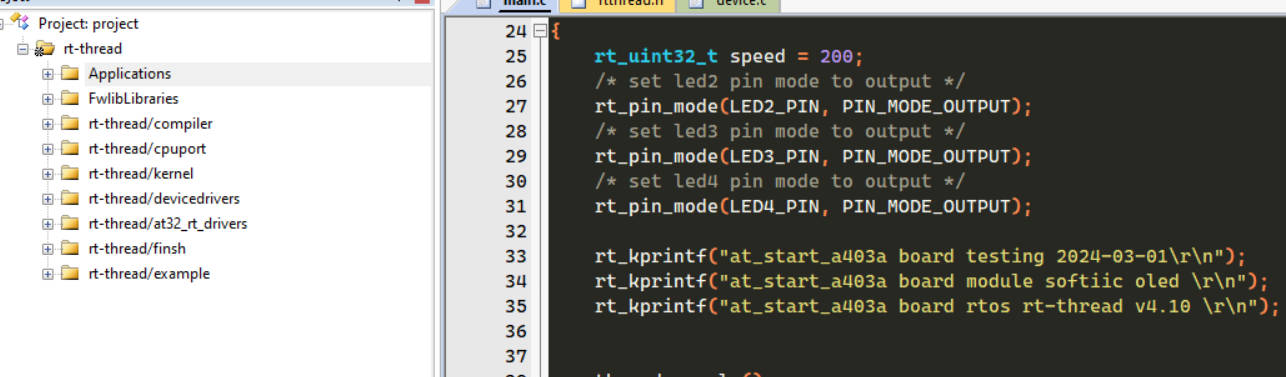
int main(void)
{
rt_uint32_t speed = 200;
/* set led2 pin mode to output */
rt_pin_mode(LED2_PIN, PIN_MODE_OUTPUT);
/* set led3 pin mode to output */
rt_pin_mode(LED3_PIN, PIN_MODE_OUTPUT);
/* set led4 pin mode to output */
rt_pin_mode(LED4_PIN, PIN_MODE_OUTPUT);
rt_kprintf("at_start_a403a board testing 2024-03-01\r\n");
rt_kprintf("at_start_a403a board module softiic oled \r\n");
rt_kprintf("at_start_a403a board rtos rt-thread v4.10 \r\n");
thread_sample();
while (1)
{
rt_kprintf("rt-thread testing start [ok] \r\n");
rt_pin_write(LED2_PIN, PIN_LOW);
rt_thread_mdelay(speed);
rt_pin_write(LED3_PIN, PIN_LOW);
rt_thread_mdelay(speed);
rt_pin_write(LED4_PIN, PIN_LOW);
rt_thread_mdelay(speed);
rt_pin_write(LED2_PIN, PIN_HIGH);
rt_thread_mdelay(speed);
rt_pin_write(LED3_PIN, PIN_HIGH);
rt_thread_mdelay(speed);
rt_pin_write(LED4_PIN, PIN_HIGH);
rt_thread_mdelay(speed);
rt_kprintf("rt-thread testing end [ok] \r\n");
}
}
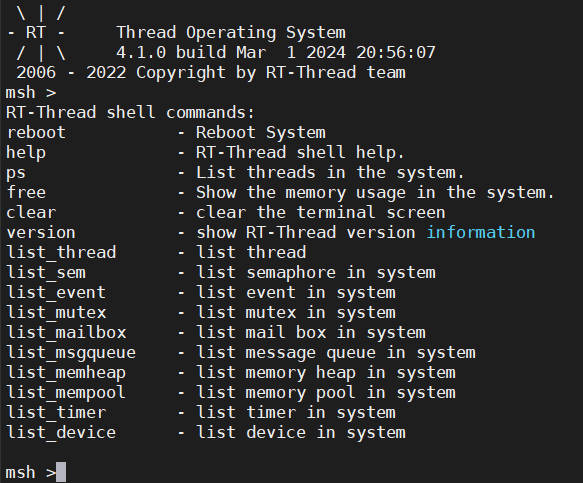
测试效果
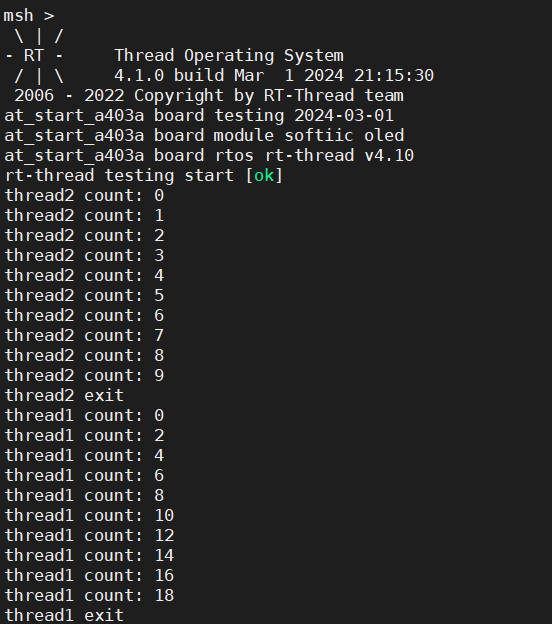
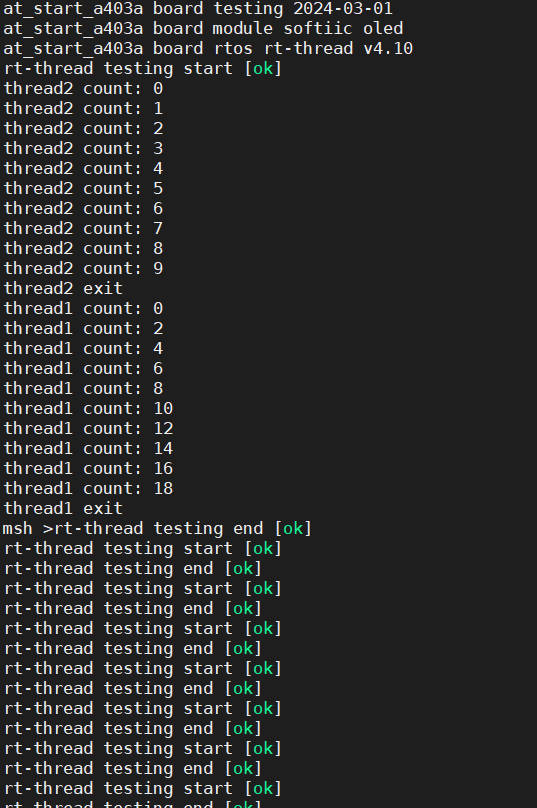
整个程序先执行thread2,因为THREAD_PRIORITY优先级比thread1高,thread2打印完成10次计数值之后,就执行thread1,打印完成20次计数值结束。同时FINSH完美正常使用。